
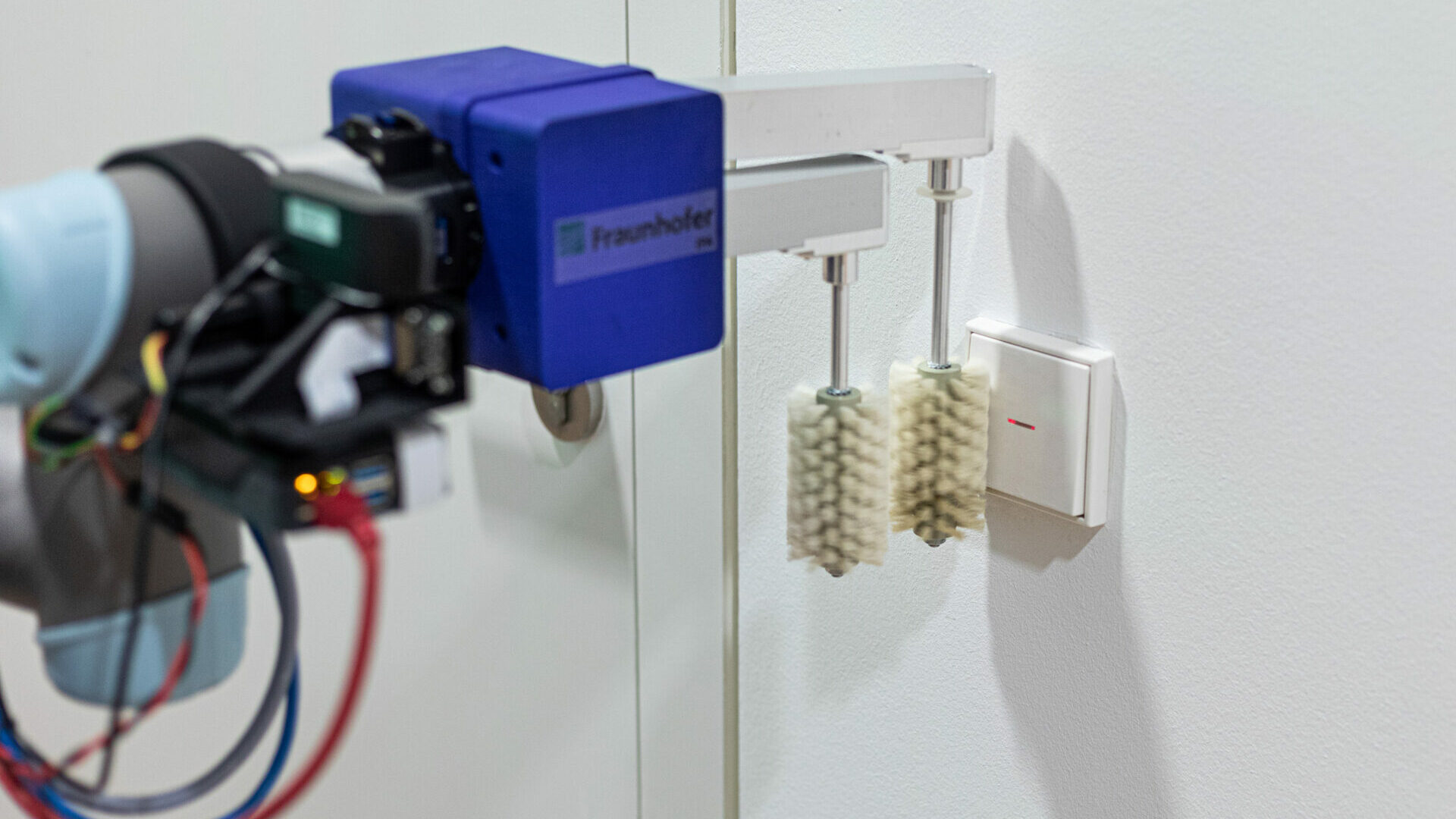
Mit seinen Reinigungsbürsten entfernt DeKonBot 2 groben Schmutz an der Türklinke und trägt gleichzeitig flächendeckend Desinfektionsmittel auf. (Quelle: Fraunhofer IPA/Foto: Rainer Bez)
Roboter für die Wischdesinfektion von Oberflächen
Der am Fraunhofer IPA entwickelte Desinfektionsroboter »DeKonBot 2« kann nach einmaligem Einlernen autonom durch ein Gebäude fahren. Türklinken, Lichtschalter oder künftig auch Griffleisten erkennt er, befreit diese mit seinem Bürstensystem von grobem Schmutz und bringt Desinfektionsmittel auf.
Veröffentlicht am 17.11.2022
Lesezeit ca. 8 Minuten
Reinigungs- und Desinfektionsaufgaben in Gebäuden stehen seit der Corona-Pandemie im Fokus, da sie dazu beitragen können, eine Ausbreitung des Virus zu verhindern. Auch außerhalb der Pandemie spielen diese Tätigkeiten eine wichtige Rolle, unter anderem in Einrichtungen des Gesundheitswesens, um das Übertragen von Krankenhauskeimen zu vermeiden. Neben der Bodenreinigung spielt die Reinigung und Desinfektion von Oberflächen eine wichtige Rolle. Für das Umfeld der »Krankenhausreinigung« definiert die neu eingeführte Hygienenorm DIN 13063 die auszuführenden Tätigkeiten. Die Norm sichert zwar die Qualität, sie steigert aber auch den Aufwand für das Reinigungspersonal. Immer mehr Aufgaben in kürzerer Zeit erhöhen das Risiko, dass die »Hygiene Compliance« leidet. Der Fachkräftemangel und der demografische Wandel verschärfen das Problem. Derzeit sind keine geeigneten Reinigungsroboter am Markt verfügbar, die eine automatisierte Reinigung und Desinfektion von Oberflächen technologisch und wirtschaftlich umsetzen können.
Desinfektionsroboter DeKonBot 2
Im Projekt »MobDi – Mobile Desinfektion« entwickelten zwölf Einrichtungen der Fraunhofer-Gesellschaft neue Schlüsseltechnologien für die roboterbasierte mobile Reinigung und Desinfektion. Eines der Ergebnisse ist der Desinfektionsroboter »DeKonBot 2« des Fraunhofer IPA. Auf der Basis des gleichnamigen Desinfektionsroboters, den das Fraunhofer IPA im Jahr 2020 in erster Generation vorgestellt hatte, entwickelten die Robotikexperten die Hardwarekomponenten weiter. Ziel war es, einen kompakteren, kostengünstigeren und leistungsfähigeren Roboter zu gestalten. Eine besondere Herausforderung bestand für die Forscher darin, das Reinigungswerkzeug flexibler, raumsparend und zugleich so zu gestalten, dass es unterschiedlichste Objekte effektiv desinfizieren kann.
Kompakte Basis mit Reichweite
Als mobile Basis wird jetzt der Scitos X3 der Firma MetraLabs eingesetzt, eine Plattform, die ausreichend Platz für alle nötigen Aufbauten bietet, und gleichzeitig klein genug ist, um auch in engen Gängen sicher zum Ziel zu kommen. Der aktuell eingesetzte Roboterarm ist in der Lage, sich optimal um die zu desinfizierenden Objekte herumzubewegen, und kann dadurch alle relevanten Kontaktflächen erreichen. Neu ist auch das Bürstensystem, mit dem die Oberflächen sowohl von grobem Schmutz befreit als auch mit Desinfektionsmittel benetzt werden. Während der Fahrt taucht der Roboter die Bürsten in einen Tank mit Desinfektionsmittel. Dadurch desinfiziert er die Bürsten zwischen den einzelnen Reinigungsvorgängen und verhindert somit, dass Keime über das Reinigungswerkzeug verschleppt werden.
Objekterkennung entscheidend
Dass die Software die zu desinfizierenden Objekte erkennt, ist eine Grundvoraussetzung für DeKonBot 2. Die Algorithmen müssen bei unterschiedlichen Umgebungsbedingungen, zum Beispiel variierenden Beleuchtungsverhältnissen, zuverlässig funktionieren. Nur so kann der Roboter die zu reinigenden Türklinken, Lichtschalter oder Aufzugknöpfe in verschiedenen Formen und Ausprägungen erkennen und im Raum lokalisieren. Möglich machen dies maschinelle Lernverfahren. Sie erkennen die Objekte anhand von zweidimensionalen RGB-Bildern und klassifizieren sie in verschiedene Objekttypen, an die der Roboter seine Reinigungsbewegung anpasst. Um die exakte Position und Kontur des zu reinigenden Objekts zu ermitteln, wird ein neu entwickeltes Sensorsystem eingesetzt. Dieses basiert auf einem Zeilenlaserscanner, der auch spiegelnde Oberflächen zuverlässig und präzise erfasst.

Einmaliges Einlernen genügt
Um den autonomen Betrieb zu ermöglichen, muss die Reinigungskraft DeKonBot 2 in einer neuen Arbeitsumgebung einmalig einlernen. Dafür fährt sie ihn per Fernsteuerung durch diese Umgebung und der Roboter erstellt hiervon automatisch eine Karte. Während der Einlernfahrt markiert sie die Position aller zu reinigenden Objekte, indem sie den Roboter vor diese bewegt. Der Roboter prüft automatisch, ob er das Objekt erkennen kann, und speichert dann die Position in der Karte ab. Nach dem Einlernprozess kann die autonome Reinigung beginnen.
Selbstständiges Reinigen
Dabei fährt der Roboter selbstständig entweder einen vom Nutzer festgelegten Bereich ab und reinigt alle dort eingelernten Objekte. Oder es können sogenannte Routinen definiert werden, in denen der Roboter einzelne Bereiche zu bestimmten Zeiten reinigt. DeKonBot 2 bewegt sich zu der vorher eingelernten Position vor einem zu reinigenden Objekt und bewegt seinen Arm mit den Sensoren und dem Reinigungswerkzeug nach vorne. Dabei streift er die Bürsten an einem Gitter ab, um Tropfen zu vermeiden. Er vermisst das zu reinigende Objekt mit seinen Sensoren und plant dann anhand der Sensordaten die nötige Bewegung des Roboterarms, damit die Bürsten das Objekt vollständig desinfizieren. Nachfolgend beginnt der Roboter mit der Desinfektion. Ist diese beendet, positioniert er das Reinigungswerkzeug wieder sicher im Desinfektionsmitteltank und fährt zum nächsten Objekt.

Praxistest zeigt hohe Nutzerakzeptanz
Ein wichtiges Ziel der Weiterentwicklung des DeKonBot war, die Produktnähe und Praxistauglichkeit zu verbessern. Um diese zu überprüfen, führten die Wissenschaftler des Fraunhofer IPA gemeinsam mit Forschern des Fraunhofer-Zentrums für Internationales Wissensmanagement und Wissensökonomie IMW eine Woche lang Tests auf einer Etage in einem Bürogebäude der EnBW in Stuttgart durch. Zu reinigen waren Lichtschalter, Türgriffe und -knäufe. Drei Führungskräfte der EnBW sowie drei Führungs- und vier Reinigungsfachkräfte vom Gebäudedienstleister Gegenbauer steuerten den Roboter, lernten neue Objekte ein und starteten und beobachteten den Regelbetrieb.
Dabei wurden relevante Leistungsdaten wie zum Beispiel die Dauer einzelner Aufgaben gemessen und auftretende Fehler sowie deren Häufigkeit protokolliert. Sowohl die technische Zuverlässigkeit als auch die erzielten Leistungsdaten lieferten gute Ergebnisse. Die autonome Navigation des Roboters in der Einsatzumgebung funktionierte ebenfalls fehlerfrei, genauso das Erkennen und Desinfizieren von Türklinken und Lichtschaltern.
Die Nutzertests zeigten, dass die Akzeptanz des Roboters hoch ist: Der Roboter fand regen Anklang bei den Probanden. Sie konnten ihn nach der Einführung erfolgreich bedienen und alle könnten sich vorstellen, mit dem Roboter dauerhaft zusammenzuarbeiten.
Wirtschaftlichkeit auf dem Prüfstand

Das Team des Fraunhofer IMW untersuchte darüber hinaus die Wirtschaftlichkeit des Roboters auf Basis einer Lebenszykluskostenrechnung. Dabei wurden alle Kosten betrachtet, die auf den gemessenen und zukünftig erreichbaren Leistungsdaten und den Kosten des Roboters von der Anschaffung bis zur Entsorgung anfallen. Als Vergleichswert dienten die Kosten einer Reinigungskraft, die ausschließlich die genannten Objekte desinfiziert. Bisher kann der Roboter unter Gegebenheiten wie im Test 30 Objekte pro Stunde reinigen. Die Berechnungen zeigten, dass ab einer Leistung von 45 Objekten pro Stunde ein wirtschaftlicher Einsatz gegeben ist. In diesem Szenario arbeitet der Roboter 24 Stunden am Tag inklusive Ladevorgängen; die Abschreibungsdauer läge bei acht Jahren.
Mit den aktuell durchgeführten Weiterentwicklungen und Optimierungen soll diese Zielleistung erreicht werden. Dadurch soll der Roboter insbesondere schneller arbeiten. Zudem sollen einzelne Komponenten wie das Werkzeug und der Tank hinsichtlich ihrer Sicherheit und Hygiene verbessert werden.
Roboter soll Türen öffnen und Aufzug fahren können
Aktuell versehen die Forscher den Roboter mit weiteren, für den Einsatz in Einrichtungen des Gesundheitswesens benötigten, Fähigkeiten. Er soll beispielsweise zusätzliche relevante Objekte wie Handläufe oder Tische erkennen und reinigen können. Dafür sollen auch weitere Reinigungswerkzeuge, beispielsweise mit wechselbaren Reinigungstüchern, aufgebaut werden. Eine weitere wichtige Funktion wäre, dass er Türen öffnen kann. So erhielte er Zugang zu Bewohner-, Patienten- oder auch Behandlungszimmern und könnte auch dort Oberflächen reinigen und desinfizieren. Individuelle Anpassungen des Roboters für weitere Anwendungsfelder sind ebenfalls bereits in Planung.

Ihre Ansprechpartnerin
Dr.-Ing. Dipl.-Inf. Birgit Graf
Leiterin der Gruppe Assistenzrobotik Telefon +49 711 970-1910