
Quelle: Fraunhofer IPA
Roboter handhabt verpackte Lebensmittel in Hochgeschwindigkeit
Eine Vielzahl unterschiedlicher Objekte in Taktzeiten von etwa einer Sekunde handhaben können: Dieser Herausforderung stellte sich ein Entwicklungsteam vom KI-Fortschrittszentrum am Fraunhofer IPA. Das Ergebnis ist ein Demonstrator, der Tabletts mit Lebensmitteln zum Beispiel für Krankenhäuser zusammenstellt.
Veröffentlicht am 06.06.2024
Lesezeit ca. 5 Minuten
Morgens, mittags und abends sind sie in großen Gesundheitseinrichtungen wie Krankenhäusern mitunter für mehrere Hundert Menschen erforderlich: Tabletts, die entsprechend der erfolgten Menüwahl mit den passenden verpackten Lebensmitteln bestückt und den Patientinnen und Patienten gereicht werden können. Dieses Vorportionieren in den Zentralküchen ist eine monotone Tätigkeit und insbesondere in Zeiten des Arbeitskräftemangels wird es immer schwerer, hierfür geeignetes Personal zu finden. Gleichzeitig muss die Aufgabe zwingend für mehrere Mahlzeiten täglich erledigt werden.
Eine Automatisierungslösung, die zumindest teilweise die Tabletts bestücken kann, ist deshalb einerseits naheliegend. Andererseits ist das automatisierte Handhaben von Lebensmitteln durchaus herausfordernd und noch nicht breit in der Praxis angekommen. Das hat mehrere Gründe: Mithilfe einer Sondermaschine wäre das Bereitstellen der verpackten Lebensmittel durch Rütteln zwar technisch möglich. Allerdings verhindern die hohen Hygiene- und Sicherheitsbestimmungen den Einsatz dieser Technologie. Hinzu kommen die vielen Varianten der zu handhabenden Objekte, an die der Wendelförderer regelmäßig angepasst werden müsste.
Unbekannte Objekte schnell und zuverlässig erkennen
Der Einsatz eines Robotersystems wäre hierfür eine bessere Lösung. Allerdings ist dann auch hier die Objektvielfalt eine Hürde: Auf jedes Tablett kommen meist etwa sechs Päckchen, die pro Mahlzeit variieren können. Das bedeutet dann beispielsweise schon zwischen 30 und 40 verschiedene Töpfchen für Marmelade, Honig, Butter oder Frischkäse und viele weitere abgepackte Bestandteile der Mahlzeit – innerhalb einer Woche. Ein Robotersystem im Vorfeld beispielsweise basierend auf CAD-Daten so zu programmieren, dass es die Objekte zuverlässig erkennt und greift, also modellbasiert agieren würde, ist zu aufwendig. Auch ein wichtiger Aspekt, der die Automatisierung in diesem Umfeld erschwert, ist die geforderte Taktzeit. Denn das Handhaben der Lebensmittel ist nur ein Teil einer größeren Anlage. Dauert dieser Schritt zu lange, gerät der gesamte Prozess aus dem Takt beziehungsweise wird unwirtschaftlich.
Erfolgreiche Zusammenarbeit im KI-Fortschrittszentrum
Das Fraunhofer IPA hat nun eine Lösung entwickelt, die die beschriebenen Hürden für eine Automatisierungslösung meistert und auch die strengen Anforderungen im Lebensmittelumfeld erfüllt. Die Lösung ist das Ergebnis einer mehrstufigen Zusammenarbeit im Rahmen des KI-Fortschrittszentrums »Lernende Systeme und Kognitive Robotik«. Das Zentrum, geführt vom Fraunhofer-Institut für Arbeitswirtschaft und Organisation IAO sowie dem Fraunhofer IPA, hat das Ziel, Technologien rund um KI und Robotik in die Anwendung zu bringen. Das Angebot beginnt bei Workshops für die Ideenfindung und reicht bis zum Aufbau von Demonstratoren. Weil das KI-Fortschrittszentrum vom Wirtschaftsministerium Baden-Württemberg umfänglich gefördert wird, entstehen für Unternehmen mit Sitz in Baden-Württemberg keine Kosten.
Diese Fördermöglichkeit nutzten auch die Projektpartner, die gemeinsam an der automatisierten Speisentablettierung für Kliniken arbeiteten. Den initialen Quick Check, also die Prüfung einer vorhandenen Automatisierungsidee, wie auch das darauffolgende Exploring Project, die Ausarbeitung eines Konzepts zu dieser Idee, führte das Fraunhofer IPA mit der Krankenhaus-Service GmbH Schwarzwald durch. Gemeinsam mit der Firma Gerhard Schubert GmbH, einem Hersteller von Verpackungsmaschinen, erfolgte dann der Aufbau eines Demonstrators für diese Anwendung.
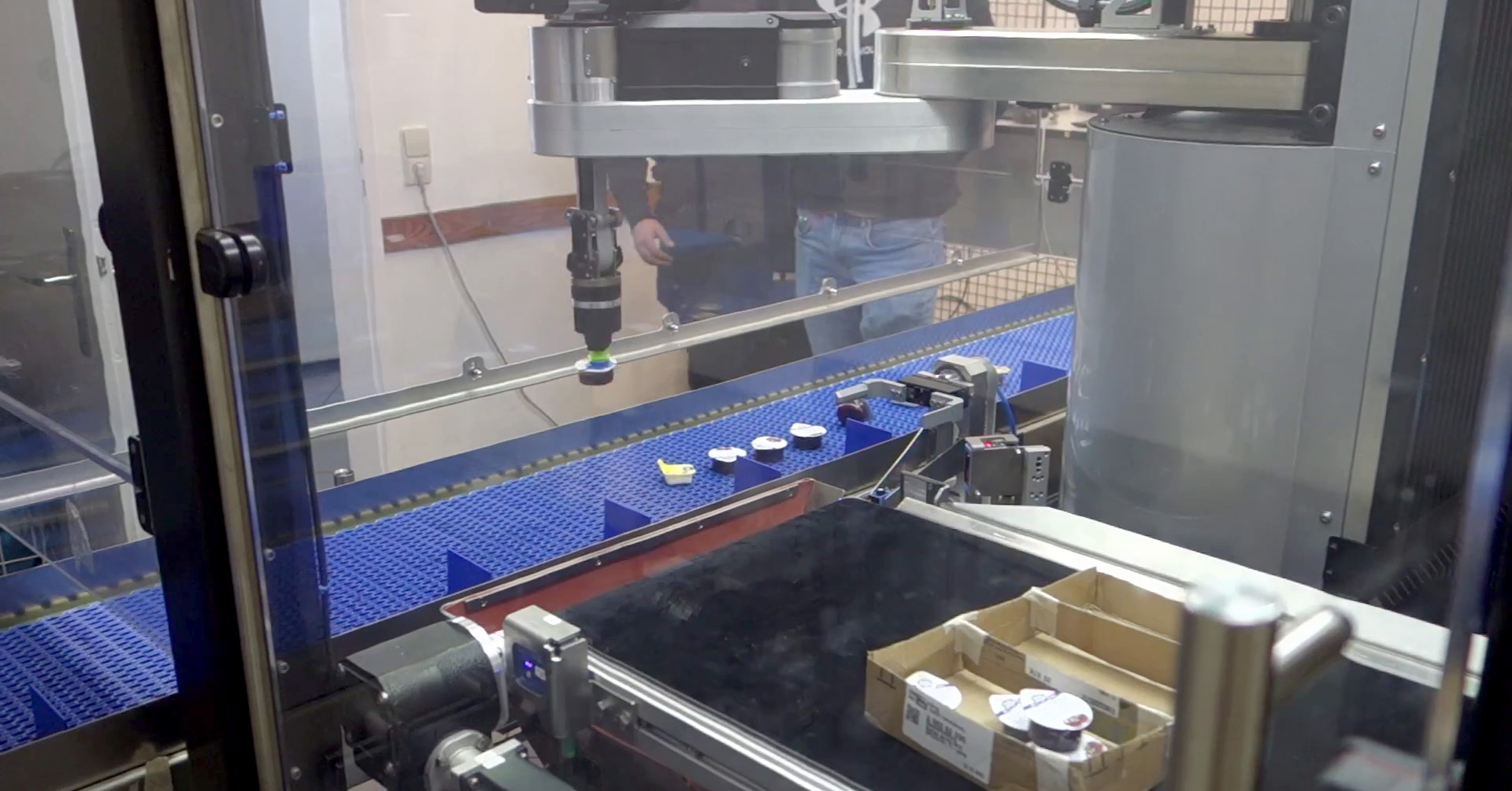
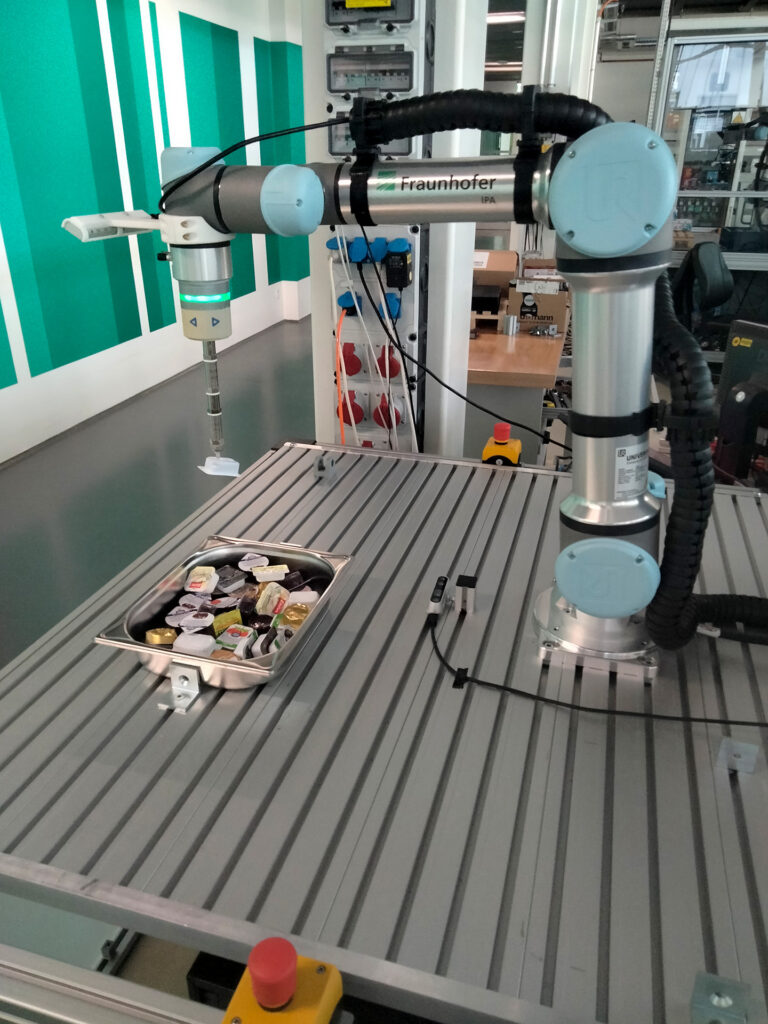
Robotersystem erfüllt alle Anforderungen an Handhabung verpackter Lebensmittel
Das Ergebnis ist ein Robotersystem, das ohne vorheriges Wissen über die zu greifenden Objekte, also modellfrei, Lebensmittelpackungen in Behältern erkennen, greifen und vorportioniert in einer Vorrichtung oder direkt auf Tabletts ablegen kann. Hierfür kommen vom Fraunhofer IPA entwickelte Algorithmen basierend auf künstlichen neuronalen Netzen zum Einsatz. Bereits zu Beginn des Projekts ermöglichten diese einem sechsachsigen Roboterarm mit Sauggreifer, die Objekte mit einer Erfolgsquote von 94 Prozent bei einer Berechnung des Greifpunktes innerhalb weniger Millisekunden zuverlässig zu greifen. Im weiteren Verlauf konnte die Geschwindigkeit der Anwendung so verbessert werden, dass mit einem Hochgeschwindigkeitsroboter der Schubert GmbH pro Minute rund 50 Teile gehandhabt werden können. Bei Bedarf kann der Roboter seine Geschwindigkeit auch dynamisch an die der menschlichen Kolleginnen und Kollegen anpassen.
Ihre Ansprechpartner
Lukas Knak
Mitarbeiter im Forschungsteam Handhabungsprozesse und Dexterity
Telefon: +49 711 970-1376
Florian Jordan
Mitarbeiter im Forschungsteam Handhabungsprozesse und Dexterity
Telefon: +49 711 970-1878