
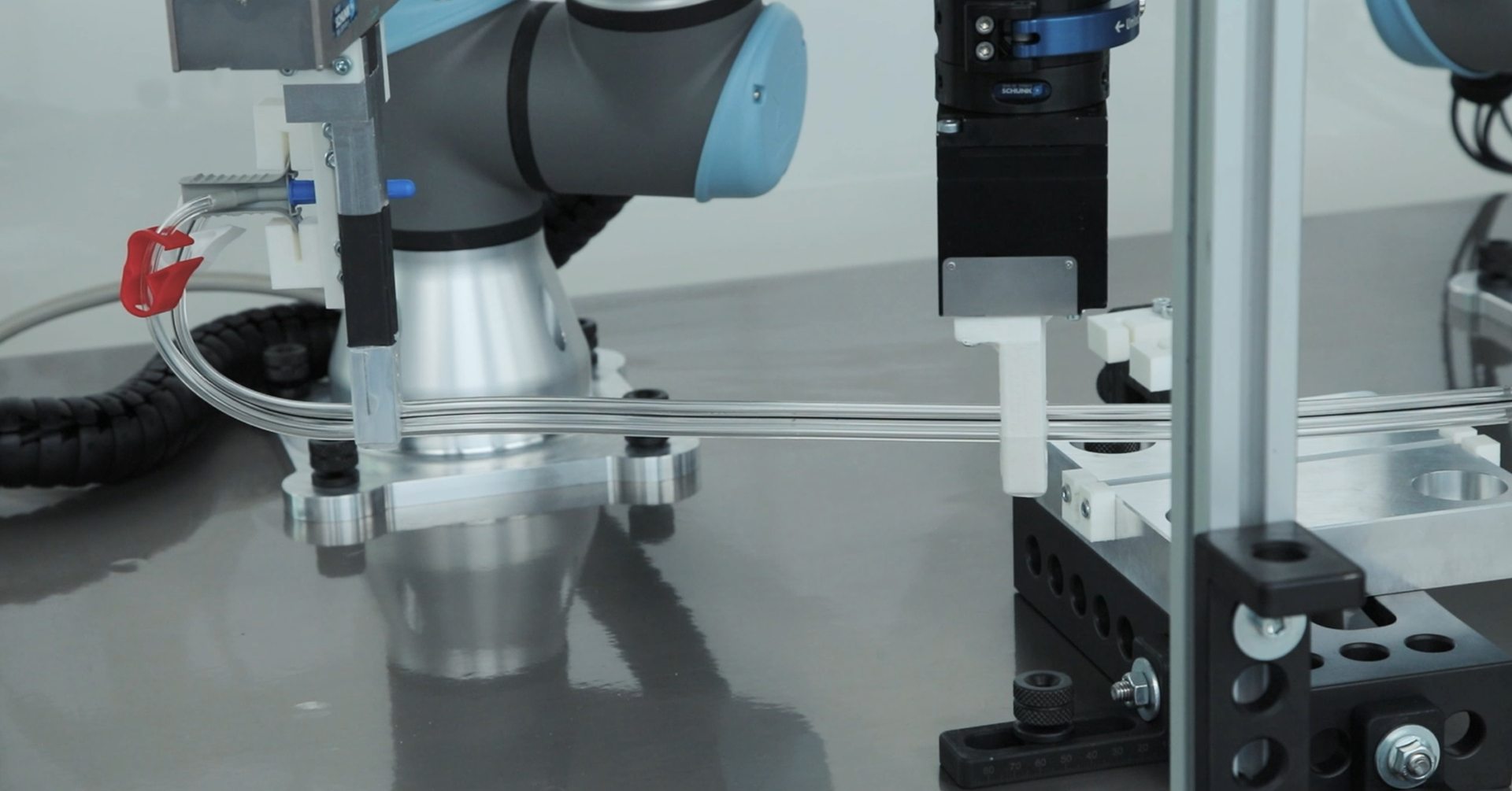
Zwei Industrieroboter, deren Bewegungen semi-synchronisiert aufeinander abgestimmt sind, erkennen und greifen einen Schlauch und legen diesen in eine Peristaltikpumpe ein. (Quelle: Fraunhofer IPA/Foto: Rainer Bez)
Roboter automatisieren Sterilitätstests in Labors
Der Bedarf an Automatisierung in Labors steigt stetig. Allerdings sind die Anforderungen an eine roboterunterstützte Anwendung in diesem Kontext hoch. Wie sie sich dennoch technisch und wirtschaftlich sinnvoll umsetzen lässt, zeigt das Fraunhofer IPA mithilfe eines Prototyps in einer Kooperation mit der Firma Skan.
Veröffentlicht am 30.11.2023
Lesezeit ca. 4 Minuten
Die Handhabung von Objekten gehörte schon immer zu den Aufgaben, die Roboter am häufigsten ausführen. Für viele Anwendungsfälle ist das auch bereits optimal gelöst und über Jahre in Serienproduktionen im Dauereinsatz. Die Autokarosserie, die durch die Anlagen im Rohbau gehievt wird, ist hierfür das bekannteste Beispiel. Doch auch in vielen anderen Umfeldern ist mehr Automatisierung mit Robotik stark nachgefragt. Dazu gehören Labors in der Life-Science- und Pharmabranche.
So gibt es im Laborumfeld zahlreiche nicht ergonomische, repetitive und entsprechend monotone Aufgaben, die für Fachkräfte wenig attraktiv sind. Hinzu kommt, dass Laborbetreiber in Zeiten des Arbeitskräftemangels überhaupt erst einmal qualifizierte Laborfachkräfte finden müssen. Robotik kann dazu beitragen, die verfügbaren Fachkräfte zu entlasten, sodass sie ihre Kapazitäten für mehr wertschöpfende Tätigkeiten nutzen können. Zudem sind im Labor effizientes, wiederholbares und prozesssicheres Arbeiten sowie eine lückenlose und fehlerfreie Dokumentation gefragt, wofür sich Robotik ebenfalls bestens eignet. Ist die robotische Lösung schließlich noch modular gestaltet, kann sie den flexiblen Ansprüchen in diesem komplexen Umfeld gerecht werden.
Roboter handhaben Schläuche
Eine beispielhafte Entwicklung für das automatisierte Handhaben von Sterilitätstests als Teil der Qualitätskontrolle in der Arzneimittelproduktion ist im Rahmen zweier Projekte des Fraunhofer IPA mit der Firma Skan entstanden. Während es in der ersten Zusammenarbeit darum ging, die grundsätzliche Machbarkeit zu prüfen, ist im nächsten Schritt eine prototypische Handhabungslösung entstanden, die bereits zum Patent angemeldet wurde. Hierbei greifen zwei Industrieroboter, deren Bewegungen semi-synchronisiert aufeinander abgestimmt sind, Sterilitätstests aus der Verpackung, erkennen und greifen einen Schlauch und legen diesen in eine Peristaltikpumpe ein. Die Roboterzelle entspricht den Abmaßen eines typischen Sterilisators bei Skan.
Eine Herausforderung ist, dass die Schläuche biegeschlaff und somit nicht leicht zu handhaben sind. Zudem besteht die Gefahr, dass sie sich verknoten. In einer Machbarkeitsstudie konnte das Entwicklerteam jedoch zeigen, dass der Prototyp robust und prozesssicher agiert.
Generell müssen roboterbasierte Anwendungen für Labors an die Anforderungen dieser Einsatzumgebung angepasst werden. Die genannten biegeschlaffen Teile wie Schläuche oder auch Beutel und ähnliches sind typische Objekte, mit denen ein Roboter dank entsprechender Trajektorienplanung und Greiftechnik umgehen können muss. Zudem sind die Vorgaben hinsichtlich Sterilität oder Reinigungsprozessen in der Produktionsumgebung, wie sie beispielsweise die »Good Manufacturing Practice« (GMP) vorgibt, streng. Und nicht zuletzt ist das Labor- und Pharmaumfeld allgemein sehr stark reguliert, sodass die eingesetzten Prozesse und Systeme hochzuverlässig agieren müssen.
Fachwissen über Automatisierung und Laborprozesse
In die Entwicklung der Anwendung sind umfangreiches Wissen über anspruchsvolle Montage-, Demontage und Handhabungslösungen sowie aus rund 50 Jahren Erfahrung mit Machbarkeitsuntersuchungen rund um Automatisierung eingeflossen. Diese Untersuchungen reichen von der Konzeption über kundenspezifischen Werkzeug- und Vorrichtungsbau, den Aufbau und die Evaluation der Roboterapplikation bis hin zur Überführung in die Kleinserie. Für die Zusammenarbeit mit der Firma Skan arbeiteten am Fraunhofer IPA Fachleute aus den Abteilungen Roboter- und Assistenzsysteme sowie Laborautomatisierung und Bioproduktionstechnik interdisziplinär zusammen, sodass sie das jeweils passende Branchenwissen in die Anwendungsentwicklung einbringen konnten. Aktuell plant Skan, den Prototyp mithilfe eines Systemintegrators oder Anlagenbauers zum Serienprodukt weiterzuentwickeln. Das Fraunhofer IPA kann bei diesem Technologietransfer weiter umfangreich unterstützen.
Ihre Ansprechpartner
Anwar Al Assadi
Leiter des Forschungsteams Roboterprogrammierung für kraftgeregelte
(De-)Montage
Telefon: +49 711 970-1264
Jan Krieglstein
Mitarbeiter des Forschungsteams Roboterprogrammierung für kraftgeregelte (De-)Montage
Telefon: +49 711 970-1087